Pytorch
CUDA Version: 12.7
Driver Version: 566.14
torch Version: 1.13.1
conda.exe地址: F:\Users\anaconda3\envs\pytorch\Scripts
环境配置
查看cuda版本
nvidia-smi
进入环境
conda activate pytorch
查看库
pip list
查看虚拟环境地址
conda env list
查看torch版本
import torch
print(torch.__version__)
print(torch.version.cuda)
检查配置是否成功
torch.cuda.is_available()
pycharm选择已有环境
setting->项目->python解释器->添加已有解释器->conda环境->使用先有环境->pytorch->应用
手写数字识别
CNN.py
构建自定义类
import torch
class CNN(torch.nn.Module): # 继承
def __init__(self):
super(CNN, self).__init__()
self.conv = torch.nn.Sequential(
# 1.卷积(卷积层)
torch.nn.Conv2d(1, 32, kernel_size=5, # 卷积核有32个
padding=2), # h2=(28-5+2*2)/1+1=28
# 2.归一化(BN层)
torch.nn.BatchNorm2d(32),
# 3.激活层 Relu函数
torch.nn.ReLU(),
# 4.最大池化
torch.nn.MaxPool2d(2) # 池化核的大小 14*14
);
self.fc = torch.nn.Linear(in_features=14 * 14 * 32, out_features=10);
def forward(self, x):
out = self.conv(x)
# 将图像展开成一维
# 输入的张量(n,c,h,w) n为数 c为通道数 c
out = out.view(out.size()[0], -1)
out = self.fc(out)
return out
main.py
用于训练模型
import torch
import torchvision.datasets as dataset
import torchvision.transforms as transforms
import torch.utils.data as data_utils
from CNN import CNN
##### 数据加载
train_data = dataset.MNIST(
root="mnist",
train=True,
transform=transforms.ToTensor(),
download=True
);
test_data = dataset.MNIST(
root="mnist",
train=False,
transform=transforms.ToTensor(),
download=True
);
# print(train_data)
# print(test_data)
###分批加载
train_loader = data_utils.DataLoader(dataset=train_data,
batch_size=64,
shuffle=True) # 打乱下标
test_loader = data_utils.DataLoader(dataset=test_data,
batch_size=64,
shuffle=True) # 打乱下标
# print(train_loader)
# print(test_loader)
cnn = CNN();
#######损失函数
loss_func = torch.nn.CrossEntropyLoss();
######优化函数
optimizer = torch.optim.Adam(cnn.parameters(), lr=0.01)
####训练过程
# epoch 通常指 一次训练数据全部训练一次
for epoch in range(10):
for index, (images, labels) in enumerate(train_loader):
# print(index)
# print(images)
# print(labels)
# 前向传播
outputs = cnn(images)
loss = loss_func(outputs, labels);
# 先清空梯度
optimizer.zero_grad()
# 反向传播
loss.backward()
optimizer.step()
print("now round{}, it is {}/{},loss is {}".format(epoch + 1, index + 1, len(train_data) // 64, loss.item()))
# break
###########测试集验证
loss_test = 0
rightValue = 0
for index2, (images, labels) in enumerate(test_loader):
outputs = cnn(images)
# print(outputs)
# print(labels)
loss_test += loss_func(outputs, labels)
_, pred = outputs.max(1)
rightValue += (pred == labels).sum().item()
# print(pred)
# 把两个张量中的每一个元素进行对比
# print((pred == labels).sum().item())
# break;
print("当前为第{}轮测试集验证, 当前批次为{}/{},loss为{},准确率是{}".format(epoch + 1, index2 + 1,
len(test_data) // 64, loss_test,
rightValue / len(test_data)))
# torch.save(cnn, "model/mnist_model.pkl")
mnist_test.py
使用模型
import cv2
import torch
import torchvision.datasets as dataset
import torchvision.transforms as transforms
import torch.utils.data as data_utils
from CNN import CNN
test_data = dataset.MNIST(
root="mnist",
train=False,
transform=transforms.ToTensor(),
download=True
);
test_loader = data_utils.DataLoader(dataset=test_data,
batch_size=64,
shuffle=True) # 打乱下标
cnn = torch.load("model/mnist_model.pkl")
loss_func = torch.nn.CrossEntropyLoss();
loss_test = 0
rightValue = 0
for index, (images, labels) in enumerate(test_loader):
outputs = cnn(images)
_, pred = outputs.max(1)
loss_test += loss_func(outputs, labels)
rightValue += (pred == labels).sum().item()
images = images.numpy() # batch , c ,h ,w
labels = labels.numpy()
pred = pred.numpy()
for idx in range(images.shape[0]):
im_data = images[idx]
im_data = im_data.transpose(1, 2, 0) # 交换维度,将通道维度移到最后
im_label = labels[idx]
im_pred = pred[idx]
print("预测值为{} 真实值为{}".format(im_pred, im_label))
cv2.imshow("nowImage", im_data)
cv2.waitKey(0) # 弹出窗口时程序停止运行
print("loss为{},准确率是{}".format(loss_test, rightValue / len(test_data)))
print(cv2.__version__)
Dataset
用于将数据从数据集中打包,然后分批次(batch)进行加载、训练
from torch.utils.data import Dataset
from PIL import Image
import cv2
import os
class MyData(Dataset):
def __init__(self,root_dir,label_dir):
self.root_dir=root_dir
self.label_dir=label_dir
self.path=os.path.join(self.root_dir,self.label_dir)
self.img_path=os.listdir(self.path)
def __getitem__(self, idx):
img_name=self.img_path[idx]
img_item_path=os.path.join(self.root_dir,self.label_dir,img_name)
img=Image.open(img_item_path)
label=self.label_dir
return img,label
def __len__(self):
return len(self.img_path)
root_dir="train"
ants_label_dir="ants"
bees_label_dir="bees"
bees_dataset=MyData(root_dir,bees_label_dir)
ants_dataset=MyData(root_dir,ants_label_dir)
train_dataset=ants_dataset+bees_dataset
TensorBoard
用处是为了打印出loss等或者图片等,以用来监视整个训练过程
环境
pip install tensorboard
导出log
# 用处是为了打印出loss等或者图片等,以用来监视整个训练过程
from torch.utils.tensorboard import SummaryWriter
import numpy as np
from PIL import Image
writer =SummaryWriter("logs")
image_path="train/ants/0013035.jpg"
img_PIL=Image.open(image_path)
img_array=np.array(img_PIL)#转化成能用tensorboard打开的图片格式
print(type(img_array))
print(img_array.shape)# (512,768,3)发现通道在最后,与add_image的默认不同
writer.add_image("test",img_array,1,dataformats='HWC')
# y= 2*x
for i in range(100):
writer.add_scalar("y=2x",2*i,i)
writer.close()
打开log
终端中输入以下指令。复制链接至浏览器,终端中退出按ctrl+c
tensorboard --logdir=logs
端口选项
tensorboard --logdir=logs --port=6007
常用Transforms
是一个用于处理图像的库
- 样例
from PIL import Image
from torchvision import transforms
# alt+7 打开structure
# ctrl+p方便查看函数参数
# ctrl+alt+l格式化代码
# tensor
img_path = "train/ants/0013035.jpg"
img_path_abs = "G:\\project\\pytorch_train\\dataset\\train\\ants\\0013035.jpg"
img = Image.open(img_path)
print(img) # 打印图片信息
# transforms如何使用
# transforms是一个工具箱
tensor_trans = transforms.ToTensor()
tensor_img = tensor_trans(img) # 将图片转为tensor
print(tensor_img)
| 输入 | PIL | Image.open() |
|---|---|---|
| 输出 | tensor | ToTensor() |
| 作用 | narrays | cv.imread() |
-
Totensor
将图片转成tensor格式
from PIL import Image
from torchvision import transforms
from torch.utils.tensorboard import SummaryWriter
writer = SummaryWriter("logs")
img = Image.open("train/ants/0013035.jpg")
print(img)
# ToTensor
trans_totensor = transforms.ToTensor() ##工具
img_tensor = trans_totensor(img)
writer.add_image("ToTensor", img_tensor)
write.close()
-
Normalize
标准化,可以参考正太分布变为标准正太分布的过。
writer.add_iamge()的第三个参数用于将该图片放置在第几step
from PIL import Image
from torchvision import transforms
from torch.utils.tensorboard import SummaryWriter
writer = SummaryWriter("logs")
img = Image.open("train/ants/0013035.jpg")
print(img)
trans_totensor = transforms.ToTensor() ##工具
img_tensor = trans_totensor(img)
#Normalize
print(img_tensor[0][0][0])
trans_norm=transforms.Normalize([0.5,0.5,0.5],[0.5,0.5,0.5])# 三通道 均值与标准差
img_norm=trans_norm(img_tensor)
print(img_norm[0][0][0])
writer.add_image("Normalize",img_norm)
writer.close()
-
RandomCrop
from PIL import Image from torchvision import transforms from torch.utils.tensorboard import SummaryWriter writer = SummaryWriter("logs") img = Image.open("train/ants/0013035.jpg") print(img) # RandomCrop trans_random=transforms.RandomCrop(50,100); trans_compose_2=transforms.Compose([trans_random,trans_totensor]) #compose为将多种transforms组合在一起 for i in range(10): img_crop=trans_compose_2(img) writer.add_image("RandomCrop",img_crop,i) writer.close()
数据集的下载及使用
import torchvision
from torch.utils.tensorboard import SummaryWriter
dataset_transform = torchvision.transforms.Compose([
torchvision.transforms.ToTensor()
])
train_set = torchvision.datasets.CIFAR10(root="./dataset", train=True, transform=dataset_transform,
download=True) # 作为训练集,下载数据集,并自动解压
test_set = torchvision.datasets.CIFAR10(root="./dataset", train=False, transform=dataset_transform,
download=True) # 作为测试集
# print(test_set[0])
# image,target=test_set[0]
# print(image)
# print(target)
# image.show()
print(test_set[0])
writer=SummaryWriter("p11")
for i in range(10):
img,target=test_set[i]
writer.add_image("test_set",img,i)
writer.close()
DataLoader
- 样例
import torchvision.datasets
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
test_data = torchvision.datasets.CIFAR10("./dataset", False, transform=torchvision.transforms.ToTensor())
test_loader = DataLoader(dataset=test_data, batch_size=64, shuffle=True, num_workers=0, drop_last=False)
# shuffle 一轮后是否重新洗牌
# num_workers 启用子线程数量
# drop_last 余数数据是否保留
img,target=test_data[0]
print(img.shape)
print(target)
writer =SummaryWriter("dataloader")
for epoch in range(2):
step = 0
for data in test_loader:
imgs,targets=data
# print(imgs.shape)#torch.Size([4, 3, 32, 32]) 4表示batch_size
# print(targets)# tensor([8, 7, 8, 3])
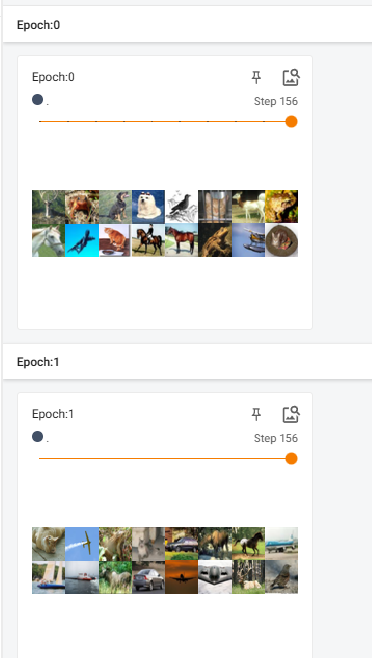
writer.add_images("Epoch:{}".format(epoch),imgs,step)
step=step+1
writer.close()
-
效果
nn.Module
基础样例
import torch
from torch import nn
class Tudui(nn.Module):
def __init__(self):
super().__init__()
def forward(self,input):
output=input+1
return output
tudui=Tudui()
x=torch.tensor(1.0)
output=tudui(x)
print(output)
卷积层
卷积核
import torch
import torchvision
from torch import nn
from torch.nn import Conv2d
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
dataset = torchvision.datasets.CIFAR10("./dataset", train=False, transform=torchvision.transforms.ToTensor(),
download=True)
dataloader = DataLoader(dataset, batch_size=64)
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
self.conv1 = Conv2d(in_channels=3, out_channels=6, kernel_size=3, stride=1, padding=0)
# stride为步进
# padding为四周的填充
def forward(self, x):
x = self.conv1(x)
return x
tudui = Tudui()
print(tudui)
writer = SummaryWriter("./logs")
step = 0
for data in dataloader:
imgs, targets = data
output = tudui(imgs)
print(imgs.shape)
print(output.shape)
writer.add_images("input", imgs, step)
# 将output从6变为3个通道
output = torch.reshape(output, (-1, 3, 30, 30))
writer.add_images("output", output, step)
step = step + 1
writer.close()
最大池化层
池化层没有学习参数
import torch
from torch import nn
from torch.nn import MaxPool2d
input =torch.tensor([[1,2,0,3,1],
[0,1,2,3,1],
[1,2,1,0,0],
[5,2,3,1,1],
[2,1,0,1,1]],dtype=torch.float)#默认为long,现在设置为浮点
# print(input.shape) torch.Size([5, 5])
input=torch.reshape(input,(-1,1,5,5))
# print(input.shape) torch.Size([1,1,5, 5])
class Tudui(nn.Module):
def __init__(self):
super(Tudui,self).__init__()
self.maxpool1=MaxPool2d(kernel_size=3,ceil_mode=True)#ceil 向上取整
def forward(self,input):
output=self.maxpool1(input)
return output
tudui=Tudui()
output=tudui(input)
print(output)
非线性激活
import torch
import torchvision.datasets
from torch import nn
from torch.nn import ReLU
from torch.nn import Sigmoid
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
#使用数据集测试
dataset = torchvision.datasets.CIFAR10("./dataset", train=True, transform=torchvision.transforms.ToTensor(),
download=True)
dataloader = DataLoader(dataset, batch_size=64)
#使用自定义数据测试
input =torch.tensor([[1,-0.5],
[-1,3]])
output=torch.reshape(input,[-1,1,2,2])
class Tudui(nn.Module):
def __init__(self):
super(Tudui,self).__init__()
self.relu1=ReLU(inplace=False)#false传形参,True传实参,默认为
self.sigmoid=Sigmoid()
def forward(self,input):
output=self.sigmoid(input)#ReLU效果不明显,用sigmoid代替
return output
tudui=Tudui()
#
# output=tudui(input)
# print(output)
writer=SummaryWriter("log__sigmoid")
step=0
for data in dataloader:
imgs,targets=data
writer.add_images("input",imgs,step)
output=tudui(imgs)
writer.add_images("output",output,step)
step=step+1
writer.close()
Sequential
将若干层组合在一起
import torch
from torch import nn
from torch.nn import Conv2d, MaxPool2d, Flatten, Linear, Sequential
from torch.utils.tensorboard import SummaryWriter
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
self.module1 = Sequential(
Conv2d(3, 32, 5, padding=2),
MaxPool2d(2),
Conv2d(32, 32, 5, padding=2),
MaxPool2d(2),
Conv2d(32, 64, 5, padding=2),
MaxPool2d(2),
Flatten(),
Linear(1024,64),
Linear(64,10)
)
def forward(self,x):
x=self.module1(x)
return x
tudui=Tudui()
print(tudui)
input=torch.ones((64,3,32,32))
output=tudui(input)
print(output.shape)
writer=SummaryWriter("logs_seq")
writer.add_graph(tudui,input)
writer.close()
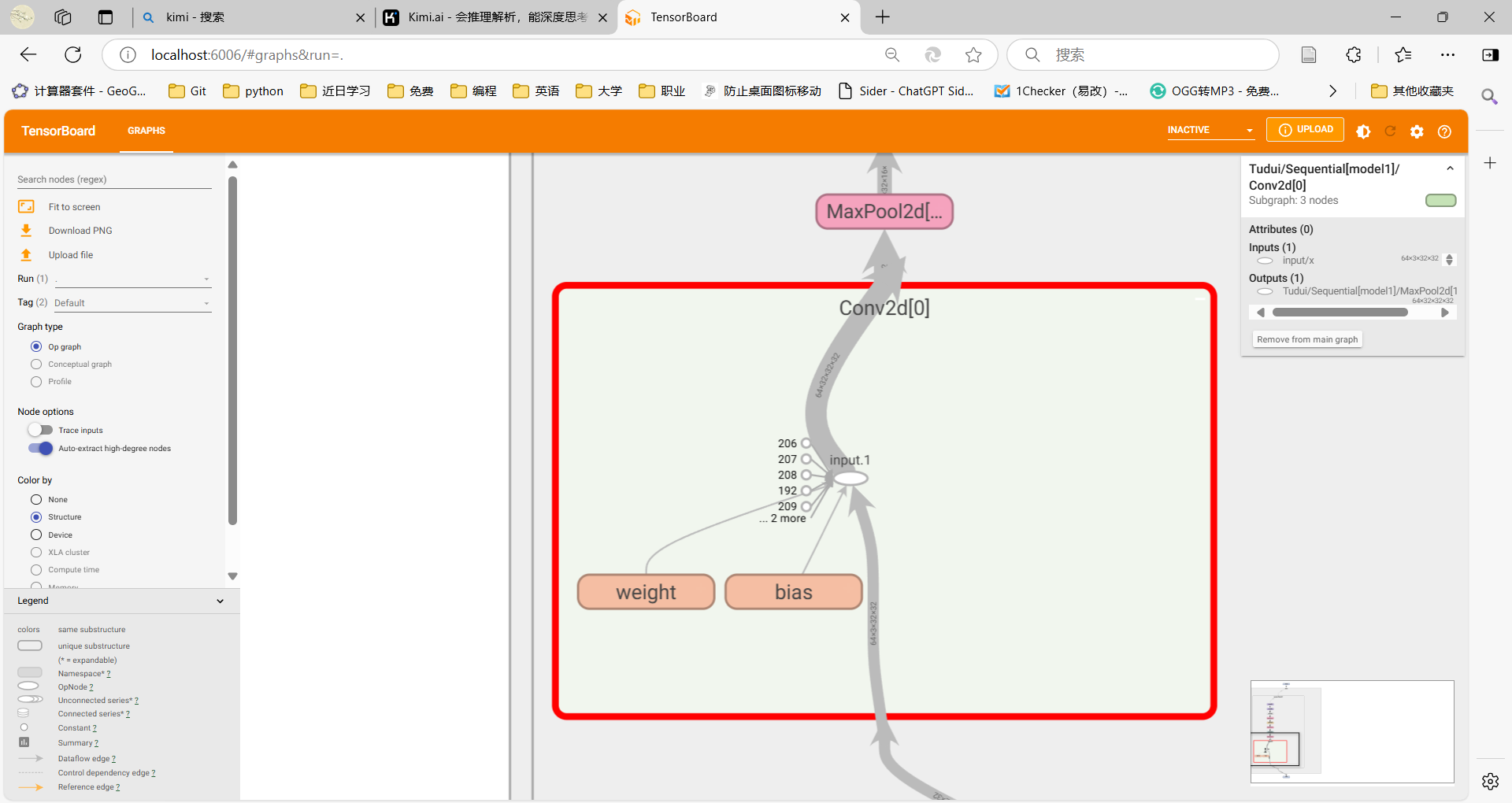
-
用tensorboard可以查看各层
writer=SummaryWriter("logs_seq") writer.add_graph(tudui,input) writer.close()
损失函数
import torch
from torch import nn
from torch.nn import L1Loss,MSELoss,CrossEntropyLoss
inputs = torch.tensor([1, 2, 3],dtype=float)
targets = torch.tensor([1, 2, 5],dtype=float)
inputs = torch.reshape(inputs, (1, 1, 1, 3))
outputs = torch.reshape(targets, (1, 1, 1, 3))
##
loss =L1Loss()
result=loss(inputs,outputs)
print(result)
##方差
loss_mse=MSELoss()
result_mse=loss_mse(inputs,outputs)
print(result_mse)
##交叉熵(分类时使用)
x=torch.tensor([0.1,0.2,0.3])
y=torch.tensor([1])
x=torch.reshape(x,(1,3))
loss_cross=nn.CrossEntropyLoss()
result_cross=loss_cross(x,y)
print(result_cross)
反向传播
反向计算各权重的梯度(此时还未调整参数)
在创建的网络模型->model1->受保护的特性->_modules->某层(如卷积层)->weight,可以查看权重
import torchvision
from torch import nn
from torch.nn import Sequential,Conv2d,MaxPool2d,Flatten,Linear
from torch.utils.data import DataLoader
dataset=torchvision.datasets.CIFAR10("dataset",train=False,transform=torchvision.transforms.ToTensor(),
download=True)
dataloader=DataLoader(dataset,batch_size=1)
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
self.module1 = Sequential(
Conv2d(3, 32, 5, padding=2),
MaxPool2d(2),
Conv2d(32, 32, 5, padding=2),
MaxPool2d(2),
Conv2d(32, 64, 5, padding=2),
MaxPool2d(2),
Flatten(),
Linear(1024,64),
Linear(64,10)
)
def forward(self,x):
x=self.module1(x)
return x
tudui=Tudui()
loss=nn.CrossEntropyLoss()
for data in dataloader:
imgs,targets=data
outputs=tudui(imgs)
result_loss=loss(outputs,targets)
result_loss.backward()
print(result_loss)
break;##只是看看weight
优化器
用于更新模型里的权重
import torch.optim
import torchvision
from torch import nn
from torch.nn import Sequential,Conv2d,MaxPool2d,Flatten,Linear
from torch.utils.data import DataLoader
dataset=torchvision.datasets.CIFAR10("dataset",train=False,transform=torchvision.transforms.ToTensor(),
download=True)
dataloader=DataLoader(dataset,batch_size=1)
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
self.module1 = Sequential(
Conv2d(3, 32, 5, padding=2),
MaxPool2d(2),
Conv2d(32, 32, 5, padding=2),
MaxPool2d(2),
Conv2d(32, 64, 5, padding=2),
MaxPool2d(2),
Flatten(),
Linear(1024,64),
Linear(64,10)
)
def forward(self,x):
x=self.module1(x)
return x
tudui=Tudui()
loss=nn.CrossEntropyLoss()
optim=torch.optim.SGD(tudui.parameters(),lr=0.01)
for epoch in range(20):
running_loss=0.0
for data in dataloader:
imgs,targets=data
outputs=tudui(imgs)
result_loss=loss(outputs,targets)
optim.zero_grad()###初始化,千万不能忘
result_loss.backward()
optim.step()
running_loss=running_loss+result_loss
print(running_loss)
现有网络模型的使用/修改
vgg16_true = torchvision.models.vgg16(pretrained=True)#True表示未进行预训练 新版pretrained这一项似乎已经去掉了,改为了weights=None
vgg16_false = torchvision.models.vgg16(pretrained=False)
print(vgg16_false)#用来查看Module有哪些层
vgg16_true.add_module('add_linear',nn.Linear(1000,10))#给该模型添加新的模型
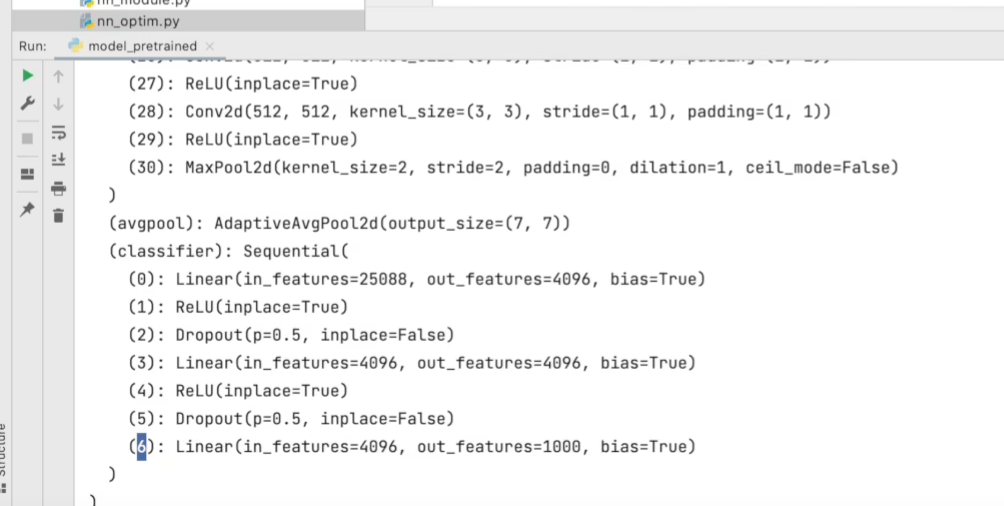
vgg16_false.classifier[6]=nn.Linear(4096,10)#classifier为该模型中某个模型的名字
-
print效果如下,显示各层信息
网络模型的保存与读取
保存
import torch
import torchvision
vgg16=torchvision.models.vgg16(weights=None)
#网络模型=结构+参数
#保存方式1 保存结构及参数
torch.save(vgg16,"vgg16_method1.pth")
#保存方式2 保存参数(官方推荐)
torch.save(vgg16.state_dict(),"vgg16_method2.pth")
加载
import torch
import torchvision
#加载方式需与保存方式对应
#方式一加载模型
#如果为自定义模型,还需要将自定义模型class代码放在此.py里
model1=torch.load("vgg16_method1.pth")
print(model1)
#方式二加载模型(官方推荐)
vgg16=torchvision.models.vgg16(weights=None)
vgg16.load_state_dict(torch.load("vgg16_method2.pth"))
print(vgg16)
小技巧
- ctrl+p显示函数参数
- ctrl+alt+L代码格式化
- ctrl+鼠标左键查看源码
- .shape查看维数
Trouble Shooting
pycharm配置anaconda环境时找不到python.exe解决办法
https://blog.csdn.net/ytusdc/article/details/137782055?fromshare=blogdetail&sharetype=blogdetail&sharerId=137782055&sharerefer=PC&sharesource=r1Way&sharefrom=from_link
torch为cpu && print(torch.version.cuda)结果为 none
地址torch库地址 F:\Users\anaconda3\pkgs
print(torch.version.cuda)
pycharm import cv2出错
- 估计是权限的问题
用管理员打开anaconda prompt
切换至你的虚拟环境
输入
pip install opencv-python
Traceback (most recent call last):
- 报错
Traceback (most recent call last):
File "G:\research\number_recognition\main.py", line 2, in <module>
import torchvision.datasets as dataset
File "F:\Users\anaconda3\envs\pytorch\lib\site-packages\torchvision\__init__.py", line 5, in <module>
from torchvision import datasets, io, models, ops, transforms, utils
File "F:\Users\anaconda3\envs\pytorch\lib\site-packages\torchvision\datasets\__init__.py", line 1, in <module>
from ._optical_flow import FlyingChairs, FlyingThings3D, HD1K, KittiFlow, Sintel
File "F:\Users\anaconda3\envs\pytorch\lib\site-packages\torchvision\datasets\_optical_flow.py", line 9, in <module>
from PIL import Image
File "F:\Users\anaconda3\envs\pytorch\lib\site-packages\PIL\Image.py", line 103, in <module>
from . import _imaging as core
ImportError: DLL load failed: 找不到指定的模块。
- 解决
pip uninstall pillow
pip install pillow
Tensorboard无法写入
-
解决
注意
write.close()的位置
解决tensorboard不能显示每一步的操作
- 解决
tensorboard --logdir="<your logs>" --samples_per_plugin=images=1000
解决tensorboard每次都是从step3开始,而且不能显示每一步的操作_在网页上打开tensorboard时,为什么step间隔不是1-CSDN博客